壁伝いねずみへの電子回路の搭載
by J. Supratman and CIT Autonomous Robot lab.. Last modified: Aug. 20, 2016.
Home
組み立て(基本編)
基本の組み立て方法です。
目次
ベースの組み立て
マウスキット付属の説明書を読んで、ベースの部分を組み立てます。
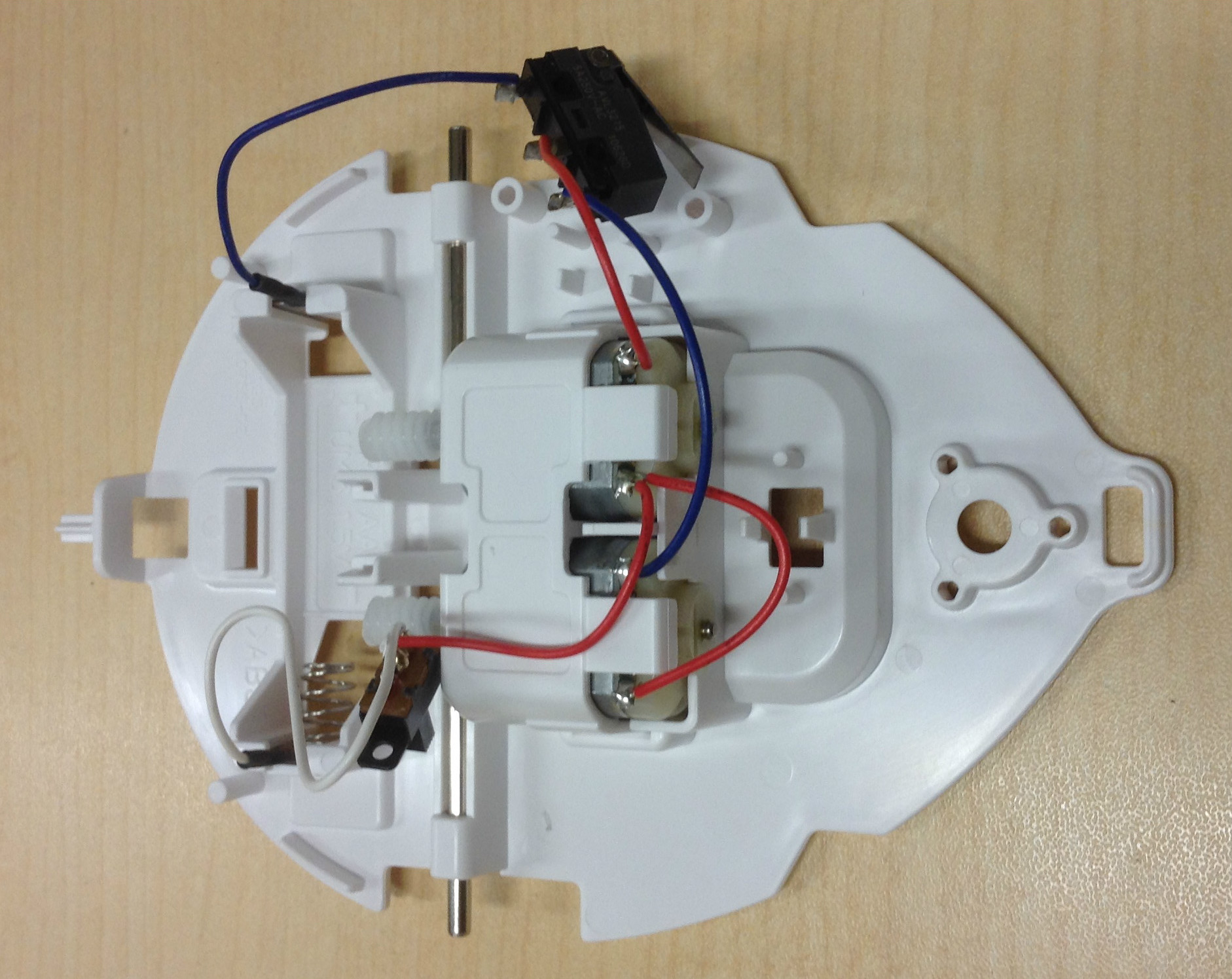
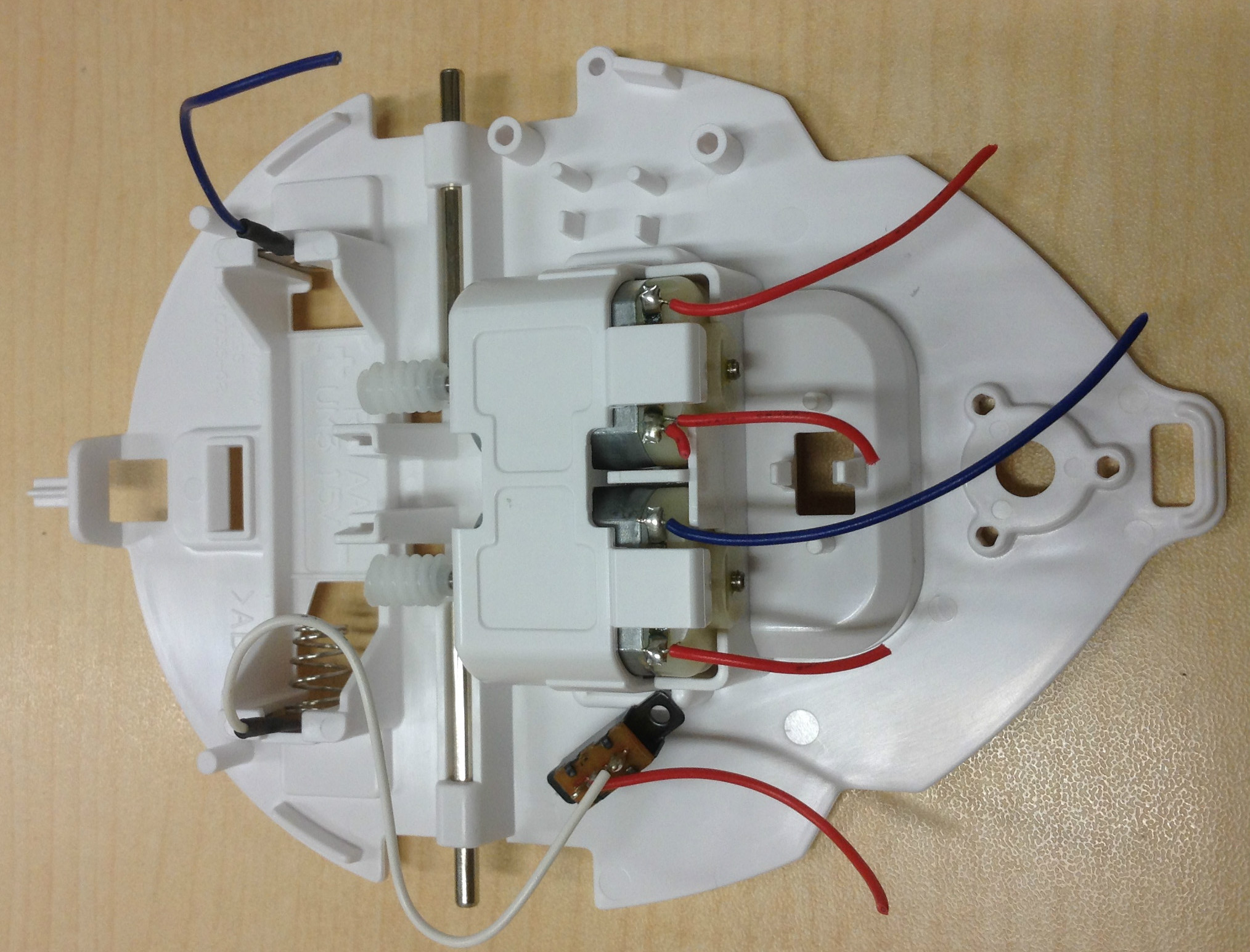
スイッチの除去
スイッチにつながっている配線をすべて切り取ります。
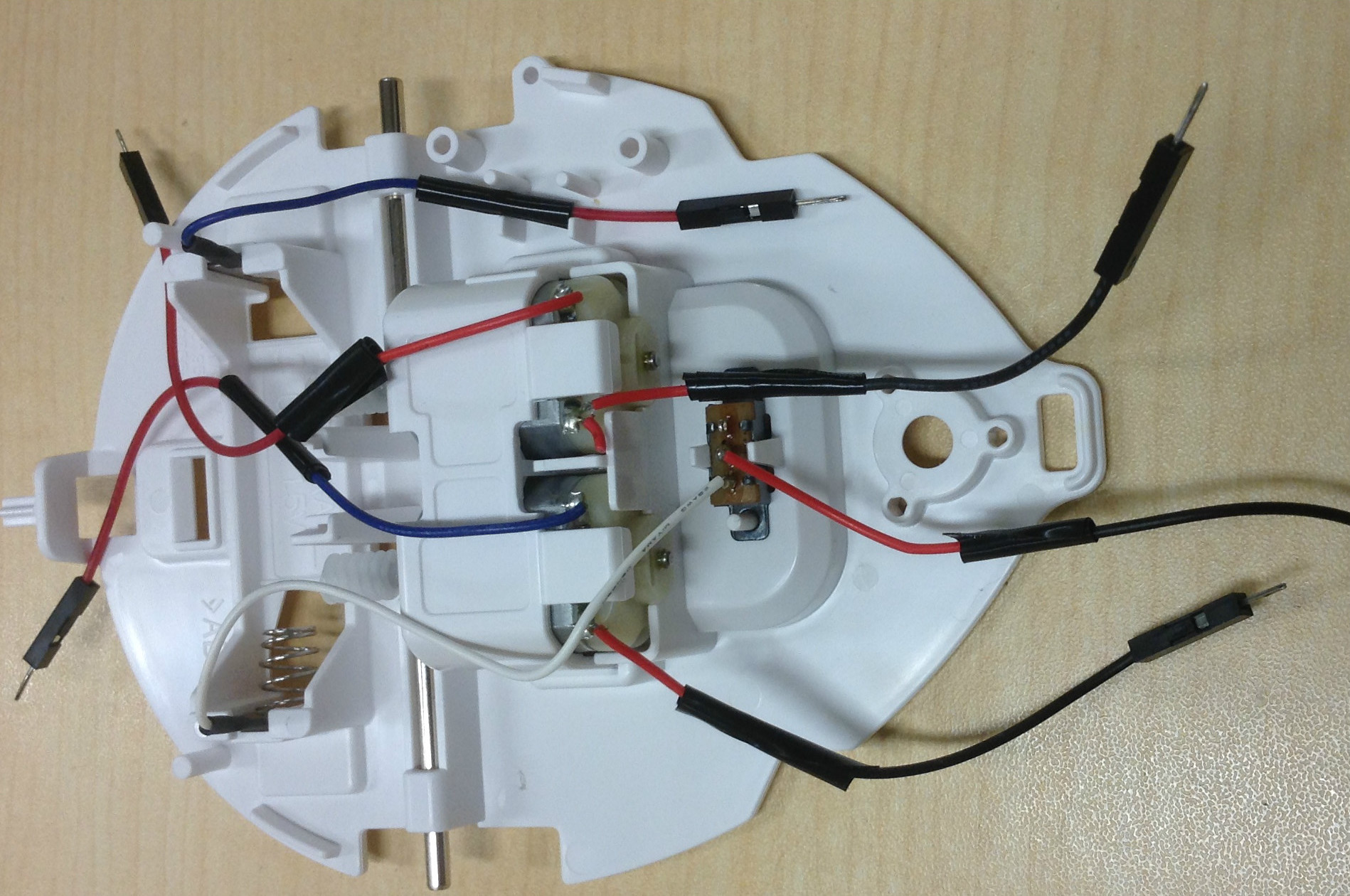
配線をジャンパワイヤーと接続
ワイヤーコードを二つに切り、先ほど切った配線と接続します。詳しい方法はこちらを参考に。
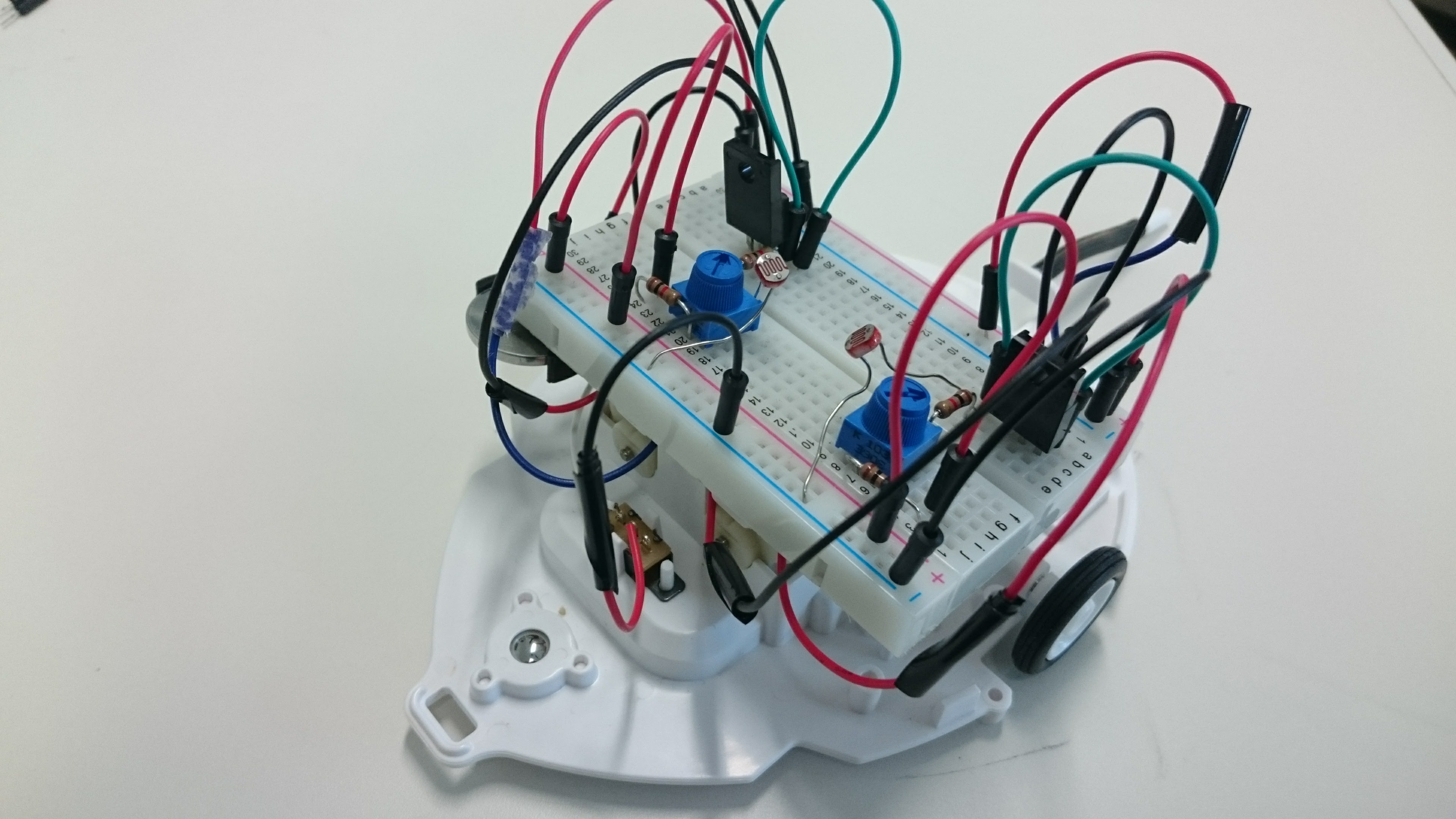
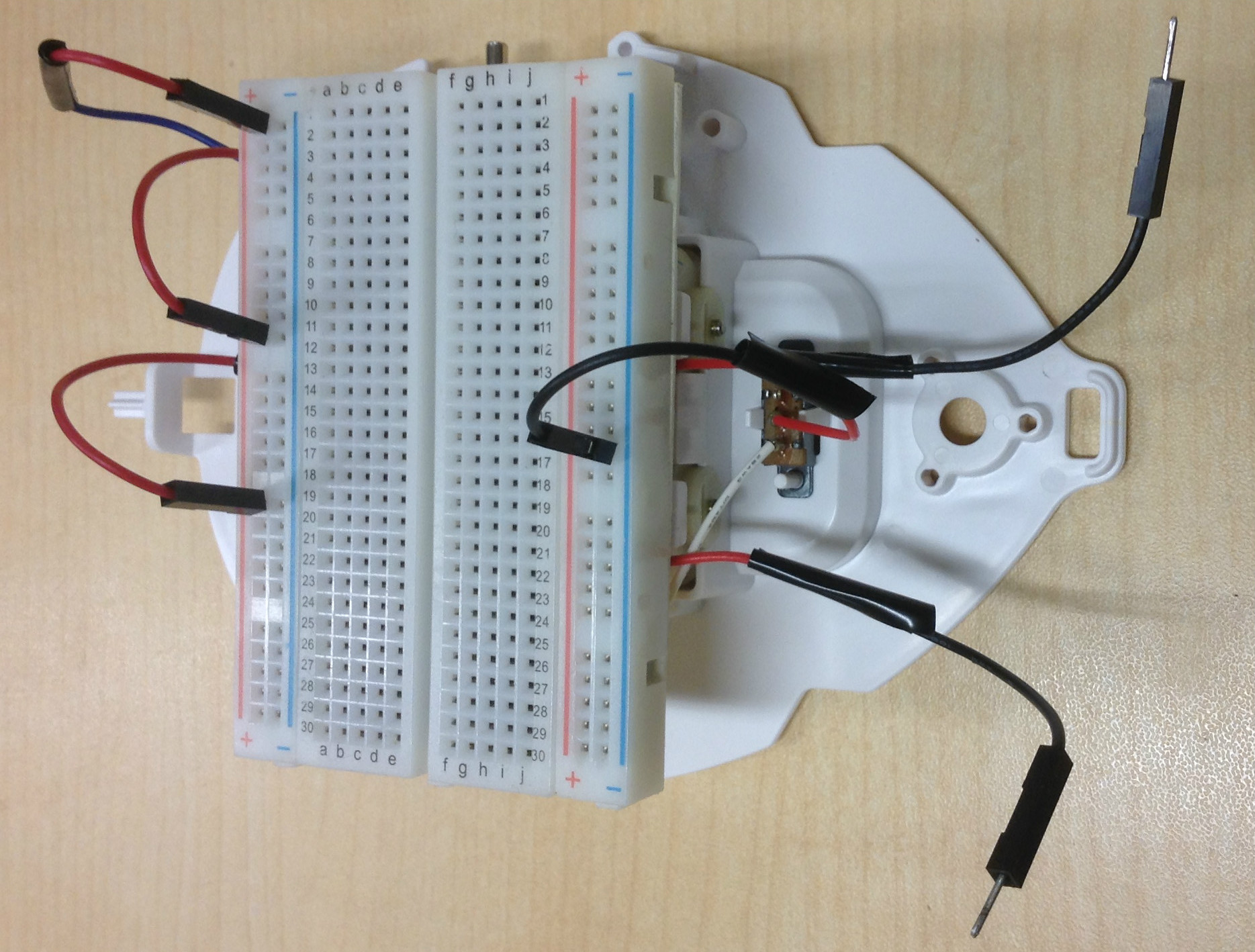
ブレッドボードの搭載
ブレッドボードをモータの上の平らな部分に貼ります。 その後、写真のようにピンを差します。 写真で赤い線をすべて片側の+のラインに差します。 このラインはモータに電力を供給するラインになります。 前方のスイッチから出ている端子は-のラインに差しておきます。 モータから出ている黒い線はそのままにしておきます。
配線
回路を見ながら配線します。配線動画を作成したので、是非ご覧下さい。
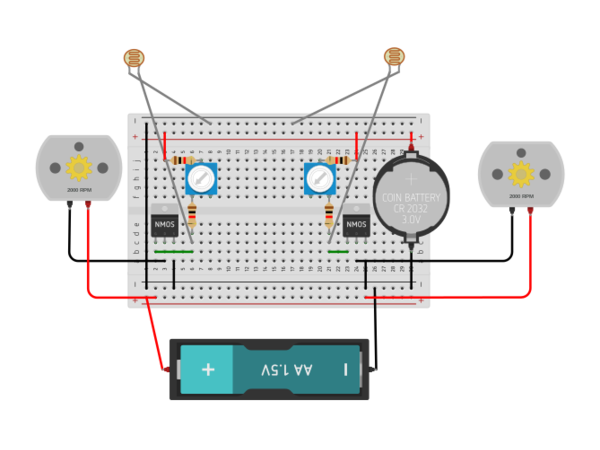
https://circuits.io/circuits/3018525-mouserobotproject-circuit-variation-1
可変抵抗の調整
例えば上の例なら、室内の照明でモータが止まり、手をかざして暗くするとモータが動くように調整します。
試走
思ったように動けば完成です。動かなかったら、どこが悪いのか考えながら配線を確認しましょう。